本文介绍: 抓取检测被定义为能够识别任何给定图像中物体的抓取点或抓取姿势。抓取策略应确保对新物体的稳定性、任务兼容性和适应性,抓取质量可通过物体上接触点的位置和手的配置来测量。为了掌握一个新的对象,完成以下任务,有分析方法和经验方法。分析方法根据抓取稳定性或任务要求的运动学和动力学公式,选择手指位置和手部构型,经验方法根据具体任务和目标物体的几何结构,使用学习算法选择抓取。根据是否需要进行目标定位,需要确定目标的姿态,进一步将其分为三类:具有已知定位和姿势的方法、具有已知定位和无姿态的方法、无定位和无姿态的方法。
抓取检测
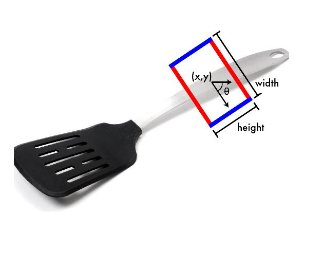
抓取检测被定义为能够识别任何给定图像中物体的抓取点或抓取姿势。抓取策略应确保对新物体的稳定性、任务兼容性和适应性,抓取质量可通过物体上接触点的位置和手的配置来测量。为了掌握一个新的对象,完成以下任务,有分析方法和经验方法。分析方法根据抓取稳定性或任务要求的运动学和动力学公式,选择手指位置和手部构型,经验方法根据具体任务和目标物体的几何结构,使用学习算法选择抓取。
根据是否需要进行目标定位,需要确定目标的姿态,进一步将其分为三类:具有已知定位和姿势的方法、具有已知定位和无姿态的方法、无定位和无姿态的方法。
1.1 具有已知定位和姿势
针对已知目标的经验方法,利用姿态将已知目标的抓取点转换为局部数据。主要算法有:
Multi–view self–supervised deep learning for 6d pose estimation in the amazon picking challenge.

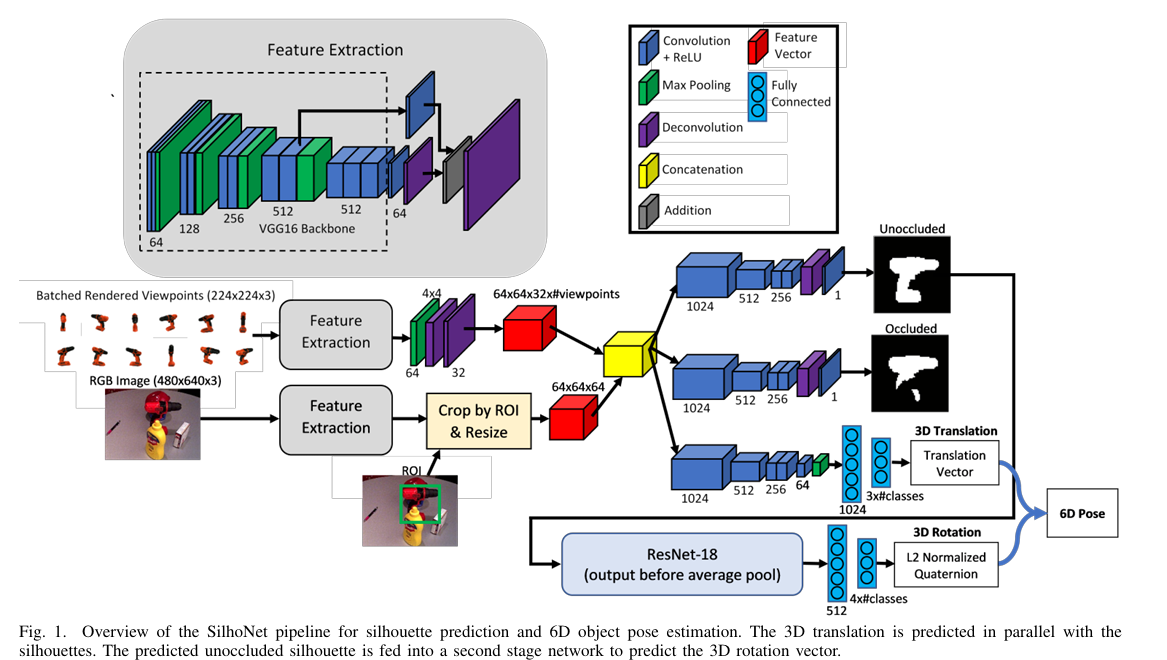
Silhonet: An RGB method for 3d object pose estimation and grasp planning.
1.2 具有已知定位和无姿态的方法
主要方法:
1.3 无定位无姿态的方法
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。