本文介绍: ROS(Robot Operating System,机器人操作系统)操作系统:任何其他软件都必须在操作系统的支持下才能运行。操作系统是用户和计算机的接口,同时也是计算机硬件和其他软件的接口。操作系统的功能包括管理计算机系统的硬件、软件及数据资源,控制程序运行,改善人机界面,为其它应用软件提供支持,让计算机系统所有资源最大限度地发挥作用,提供各种形式的用户界面,使用户有一个好的工作环境,为其它软件的开发提供必要的服务和相应的接口等。Ros和其他的操作系统最大的区别:进程之间的通信。
1.概述
2.名词解释
2.1节点(Node)
2.2节点管理器(Master)
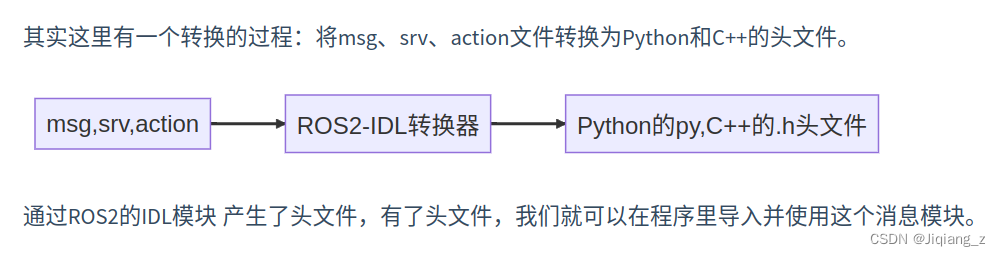
2.3消息(Message)
2.4话题(Topic)
2.5服务(Service)
2.6动作(Action)
2.7消息记录包(Bag)
2.8参数(Parameter)
2.9功能包(Package)和工作空间(workSpace)
2.10功能包清单(Package manifest)
2.11元功能包(Meta Package)
2.12 启动文件(roslaunch)
2.13通信机制
2.14举例理解
3.构架
3.1OS层
3.2中间层
3.3应用层
3.4总结
参考文献
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。