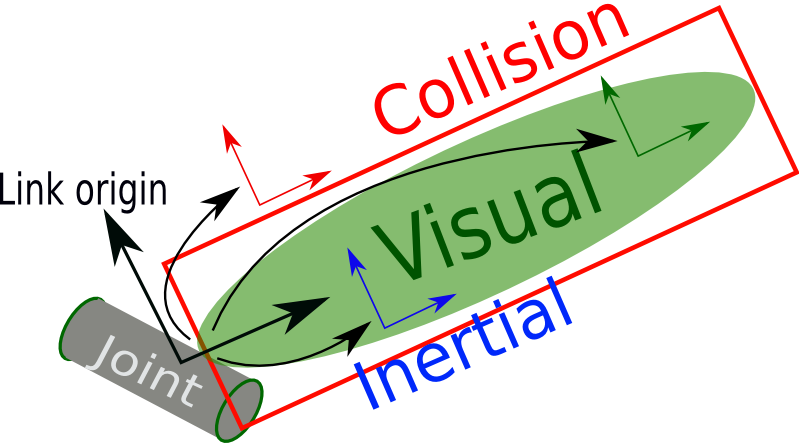
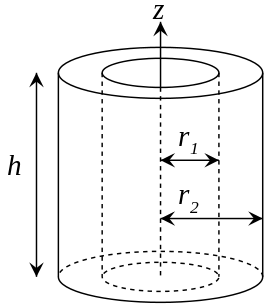
本文介绍: 注意:Ĉx、Ĉy、Ĉz 相对于 L̂x、L̂y、L̂z 的方向由 标签中的 rpy 值指定。它们定义的几何形状的组合构成了刚体(link)的可视化表示。所有自由度都被锁定。表示从 Lo(刚体坐标系原点)到 Co(刚体质量中心)的位置矢量为 x L̂x + y L̂y + z L̂z,其中 L̂x、L̂y、L̂z 为链接框架 L 的正交单位矢量。固定在质心坐标系 C 中的单位向量Ĉx、Ĉy、Ĉz 相对于 Co(刚体质心)的惯性矩 ixx、iyy、izz 和惯性积 ixy、ixz、iyz。
系列文章目录
前言
一、robot
1.1 <robot> 元素
机器人描述文件的根元素必须是 robot ,所有其他元素都必须封装在其中。
1.2 元素
1.3 属性
name
1.4 示例
二、link
2.1 <link> 元素
2.2 属性
2.3 元素
2.3.1 <inertial>(可选:如果未指定,默认质量为零,惯量为零)
2.3.2 <visual>(可选)
2.3.2.5 <material>
2.3.4 <collision>
2.4 推荐的网格分辨率
2.5 多碰撞体
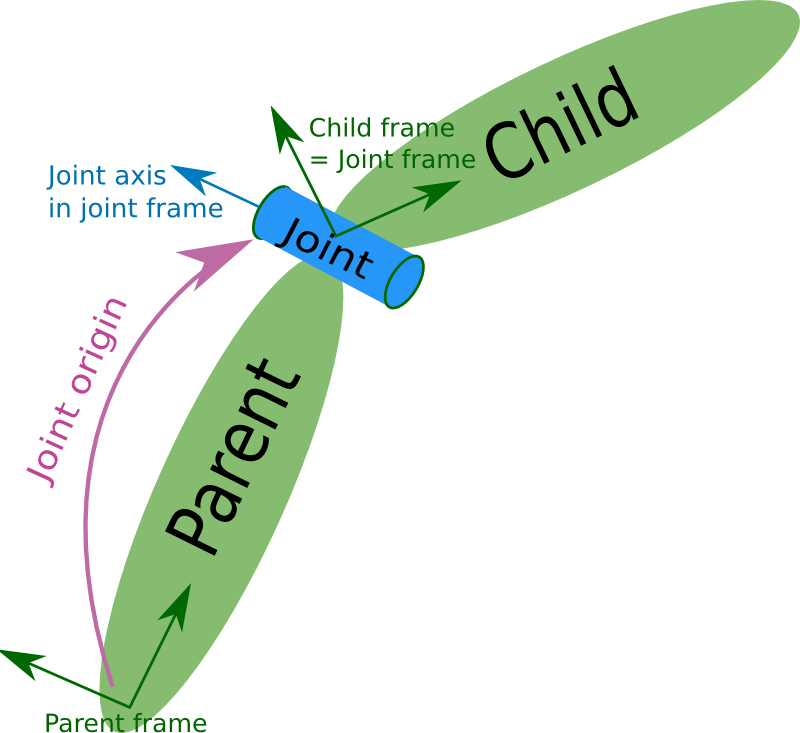
三、Joint
3.1 <Joint> 元素
3.2 属性
name(必填)
type(必填)
3.3 元素
3.3.1 <origin> (可选:如果未指定,默认为 identity)
3.3.2 <parent>(必填)
3.3.3 <child>(必填)
3.3.4 <axis>(可选:默认为(1,0,0)
3.3.5 <calinration>(可选)
3.3.6 <dynamics>(可选)
3.3.7 <limit>(仅外旋式和棱柱式接头需要)
3.3.8 <mimic>(可选)(ROS Groovy 的新功能,参见问题)
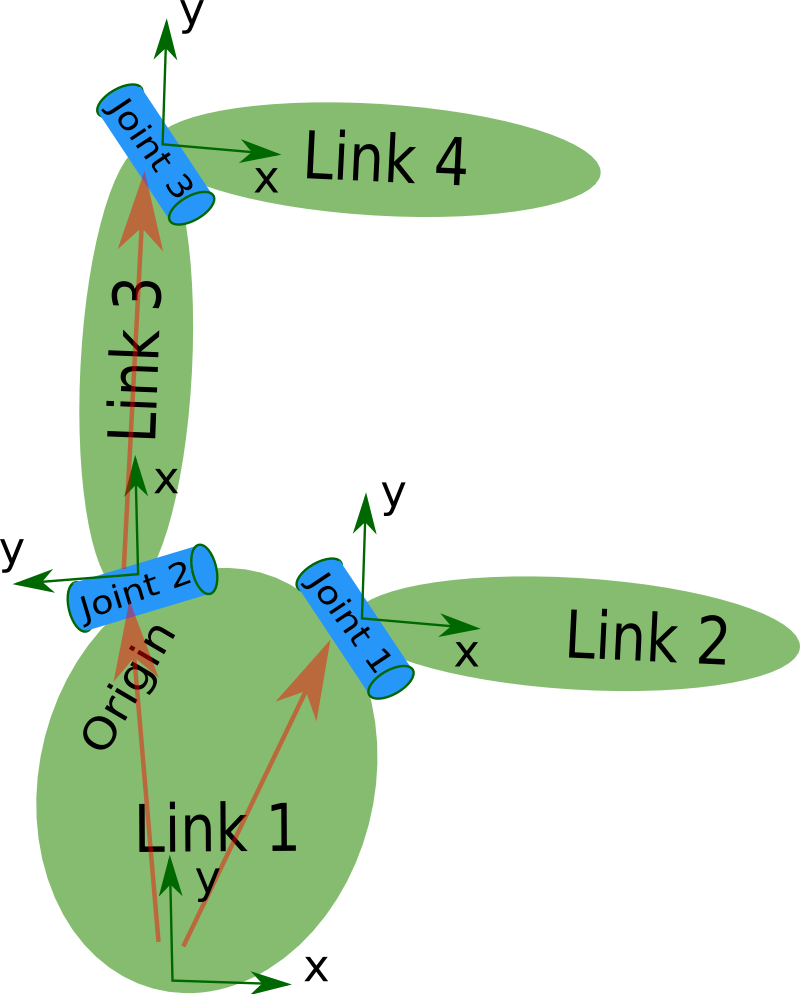
四、model
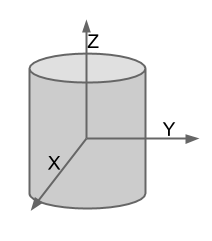
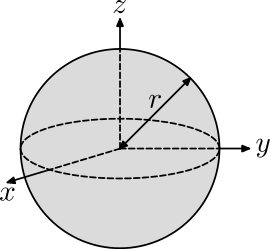
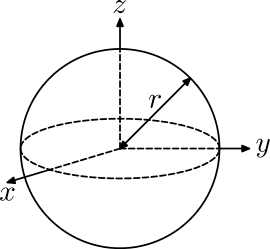
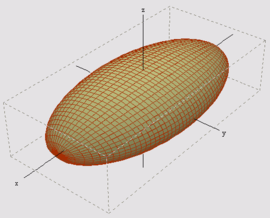
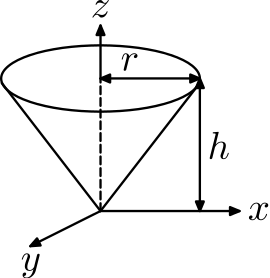
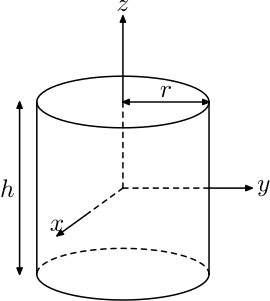
五、常见几何体的惯量矩阵
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。

![[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(1) 质量刚体的在坐标系下运动](http://www.7code.cn/wp-content/uploads/2023/11/ee6748cbc735e6105405f8a984d954c804b93f34bc916-Z0IqTf_fw1200.png)
