本文介绍: 我们在使用机器人的时候,总是习惯使用俯仰角来描述机器人末端姿态的变换。这样更直观,但是机器人为了插值方便计算,总是采用旋转矢量来来描述机器人的姿态。该旋转矢量及不直观,单一轴角度旋转时还可以理解,当两个轴或三个轴一起旋转,值的偏离很大。
我们在使用机器人的时候,总是习惯使用俯仰角来描述机器人末端姿态的变换。这样更直观,但是机器人为了插值方便计算,总是采用旋转矢量来来描述机器人的姿态。该旋转矢量及不直观,单一轴角度旋转时还可以理解,当两个轴或三个轴一起旋转,值的偏离很大。
1.找到机器人中如何描述旋转矢量和俯仰角

在此页面中,TCP中的RX,RY,RZ就是旋转矢量,而非俯仰角,点击此处任何输入框,可以跳转到点编辑界面。
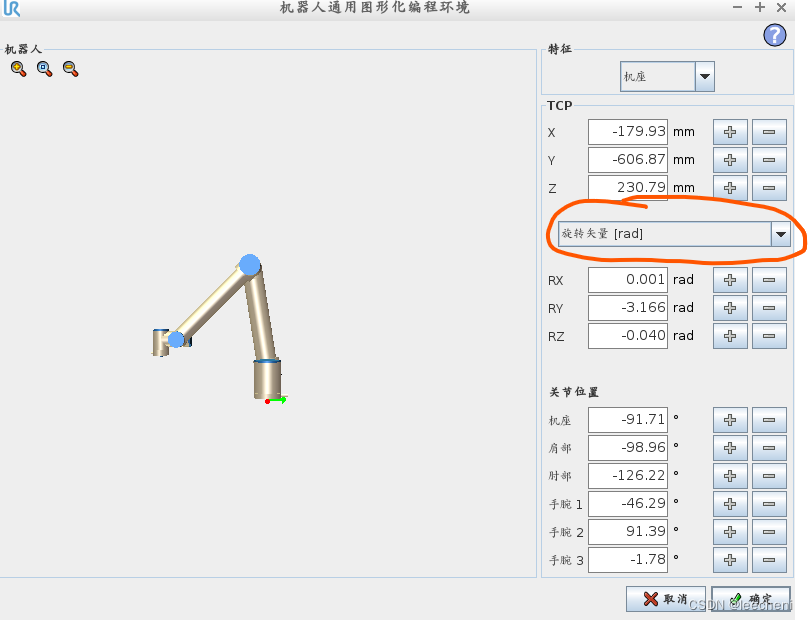
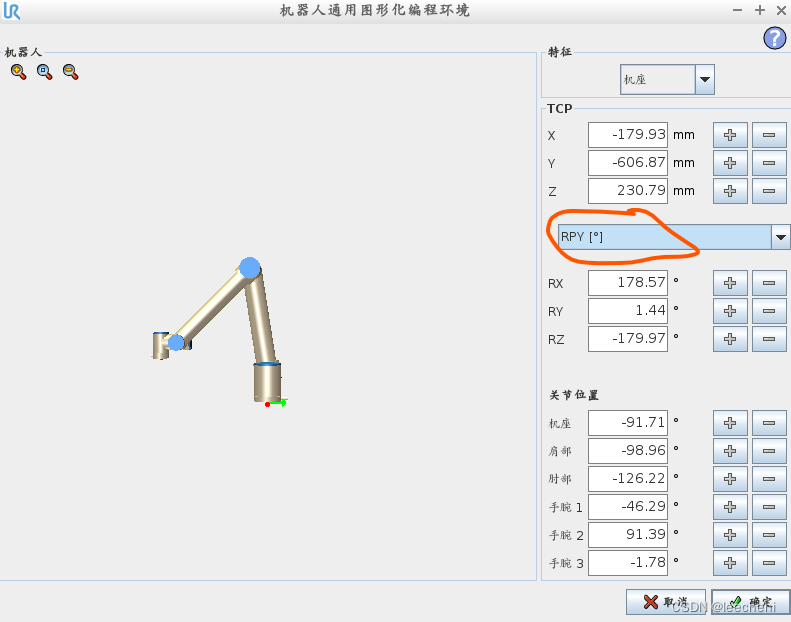
此处,明确显示了该值为旋转矢量,下拉选择俯仰角,即可以通过编辑俯仰角,改变旋转矢量。
 2.如何在UR-script,对应的指令是哪一个呢?
2.如何在UR-script,对应的指令是哪一个呢?
在e系列中对应的是如下截图,CB系列中也是类似的,可以自己查询。通过这两个指令,我们就可以在工控机中自己的代码中嵌入,计算完机器人的姿态后,进行最后的旋转。


3.这些概念的深层解释,官网描述如下

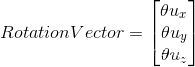
ROTATION VECTOR

RPY
TRANSFORMATION MATRIX
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。



