本文介绍: Proteus仿真stm32f103r6输出PWM/正弦波。
资料下载地址:Proteus仿真stm32f103r6输出PWM/正弦波
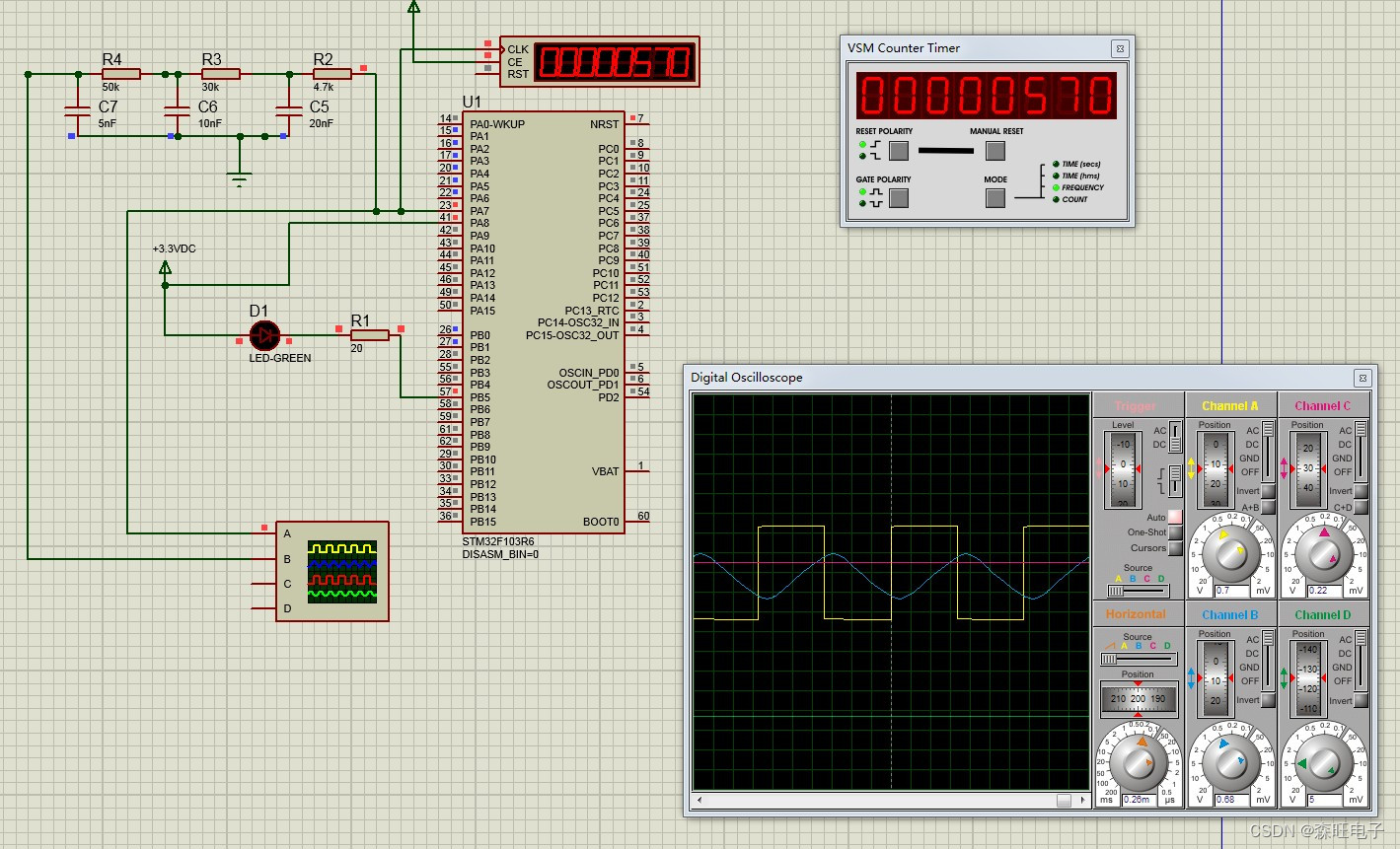
一、仿真图
Proteus仿真stm32f103r6输出PWM/正弦波
二、程序
#include "pbdata.h"
u16 fre;
void RCC_Configuration(void);
void GPIO_Configuration(void);
void TIM3_Configuration();
void Delay (uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
int main(void)
{
u16 arr=42000;
u16 led_dt = arr/2;
RCC_Configuration(); //系统时钟初始化
GPIO_Configuration();//端口初始化
TIM3_Configuration(arr);//定时器和pwm配置
while(1)
{
TIM_SetCompare2(TIM3,led_dt); //用的是TIM3的通道2,输出PWM 送到相应的寄存器中 //满占空比为900
GPIO_SetBits(GPIOB,GPIO_Pin_5); //LED 发光
Delay(0x2ffff);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);//LED 熄灭
Delay(0x2ffff);
// if(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_7)== Bit_RESET)
// {
// //LED 发光
// GPIO_SetBits(GPIOB,GPIO_Pin_5);
// }
// else
// {
// //LED 熄灭
// GPIO_ResetBits(GPIOB,GPIO_Pin_5);
// }
}
}
void RCC_Configuration(void)
{
SystemInit();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);//这个是必须的,仿真软件必须的
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//端口复用,一定在APB2的时钟线
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//PWM
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //通过PWM控制,端口为复用方式输出
GPIO_Init(GPIOA,&GPIO_InitStructure);
//LED
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
//BUTTON
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;
GPIO_Init(GPIOC,&GPIO_InitStructure);
}
void TIM3_Configuration(arr)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStructure; //PWM的结构体
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//TIM3 复用功能部分映射,可以此找到对应的管脚
//关于部分映射可以参考“STM32参考手册”119面
//定时器初始化
TIM_TimeBaseStruct.TIM_Period=arr;//初值
TIM_TimeBaseStruct.TIM_Prescaler=2;//预分频
//不分频,在晶振为72MHz的情况下,定时器执行到899后即会溢出,表示计数满
TIM_TimeBaseStruct.TIM_ClockDivision=0;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;//向上
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStruct);
//pwm初始化
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; //使用模式1
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; //使能位
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //设置输出极性,一定注意
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable); //与装载使能,不会说执行一次后就不执行了
TIM_Cmd(TIM3,ENABLE);
}
/*PWM不是中断,所以不需要设置中断优先级 */
原文地址:https://blog.csdn.net/qq_35654286/article/details/135540625
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_55252.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!
主题授权提示:请在后台主题设置-主题授权-激活主题的正版授权,授权购买:RiTheme官网
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。