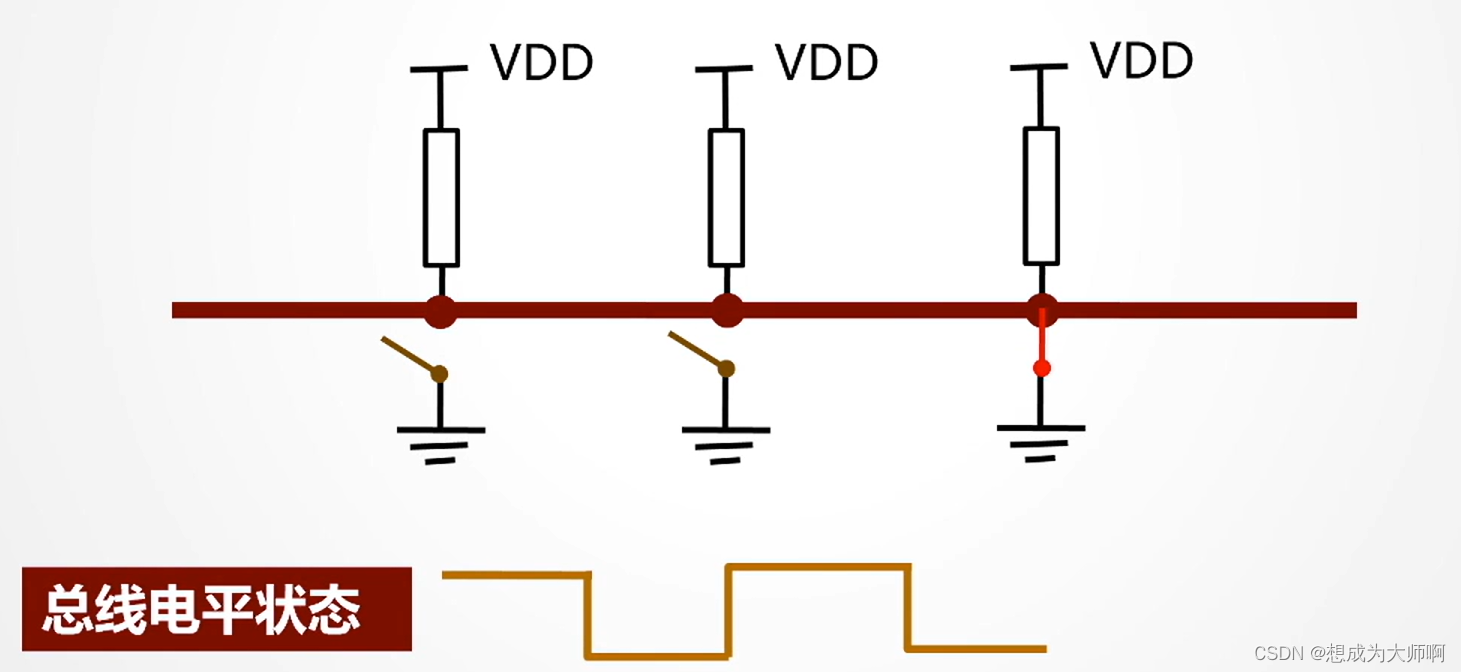
本文介绍: 是控制器局域网Controller Area Network 的缩写,1986年,由德国Bosch公司为汽车开发的网络技术,主要用于汽车的监测与控制,目的为适应汽车“减少线束的数量”“通过多个网络进行大量数据的高速传输”的需求。汽车网络是将汽车上所有电子传感器、执行器和电子控制单元(ECU)连接组网的通信形式。根据通信速率,汽车工程师协会(SAE)定义了如下类别的汽车网络。并接到同一总线时,只要其中一个节点输出低电平,总线就为低电平;定义:CAN收发器逻辑信号和物理信号之间的转换采用。
汽车CAN总线简述
CAN 是控制器局域网Controller Area Network 的缩写,1986年,由德国Bosch公司为汽车开发的网络技术,主要用于汽车的监测与控制,目的为适应汽车“减少线束的数量”“通过多个网络进行大量数据的高速传输”的需求。

CAN发展时间线
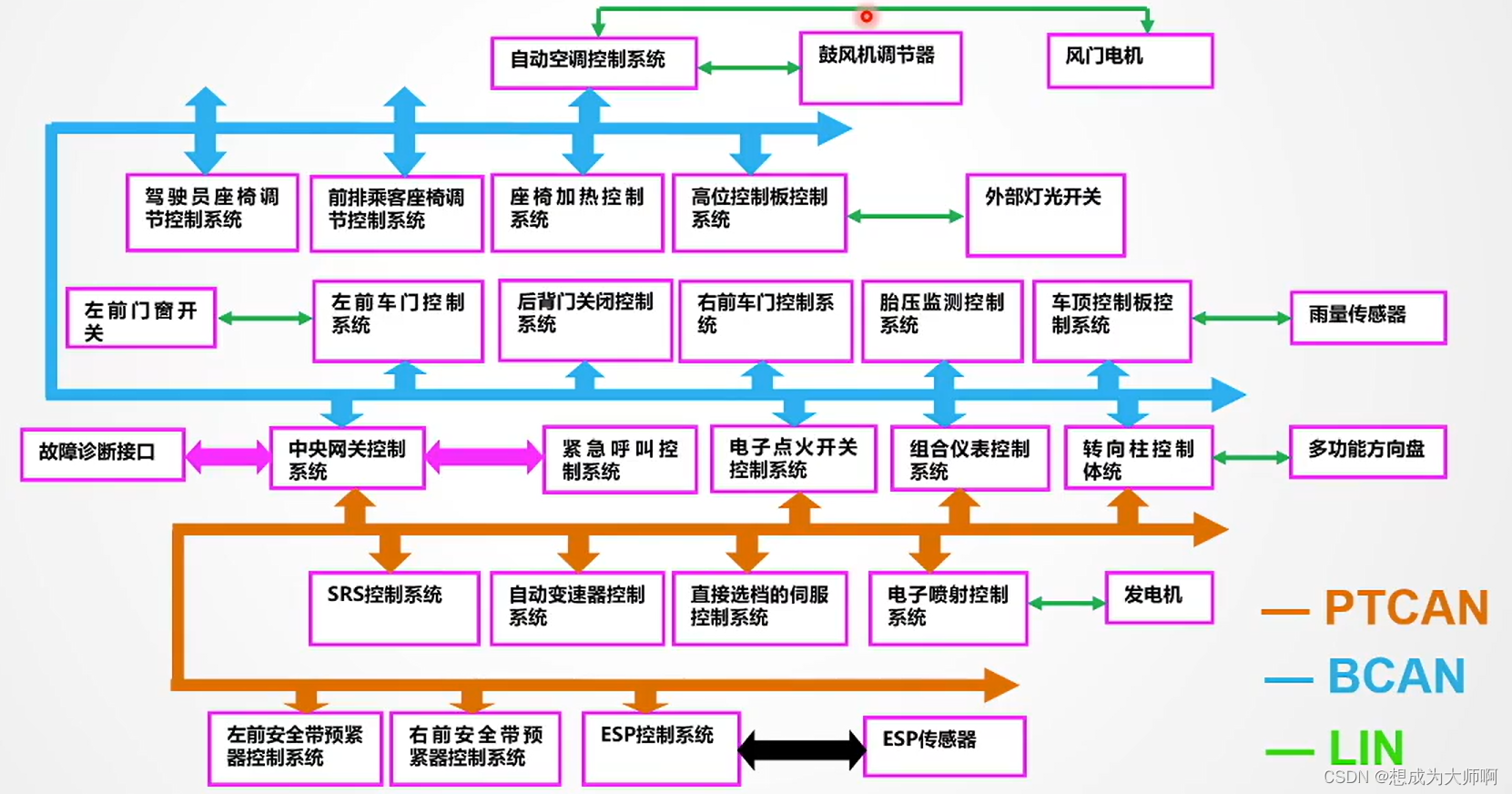
汽车网络是将汽车上所有电子传感器、执行器和电子控制单元(ECU)连接组网的通信形式。根据通信速率,汽车工程师协会(SAE)定义了如下类别的汽车网络。
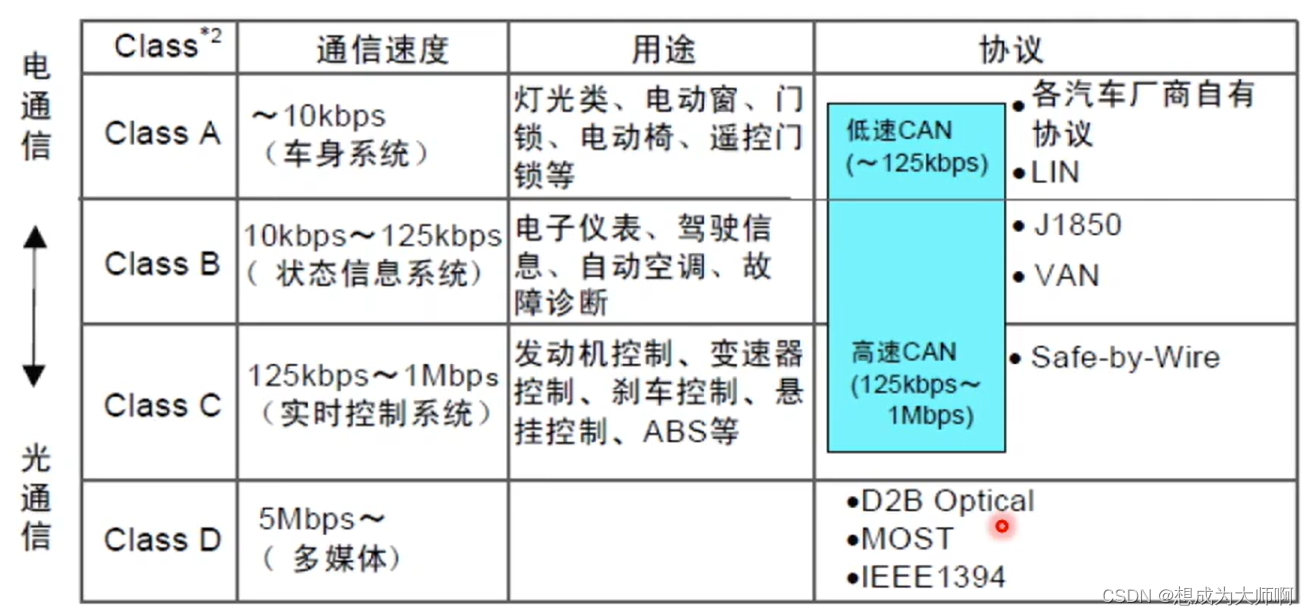
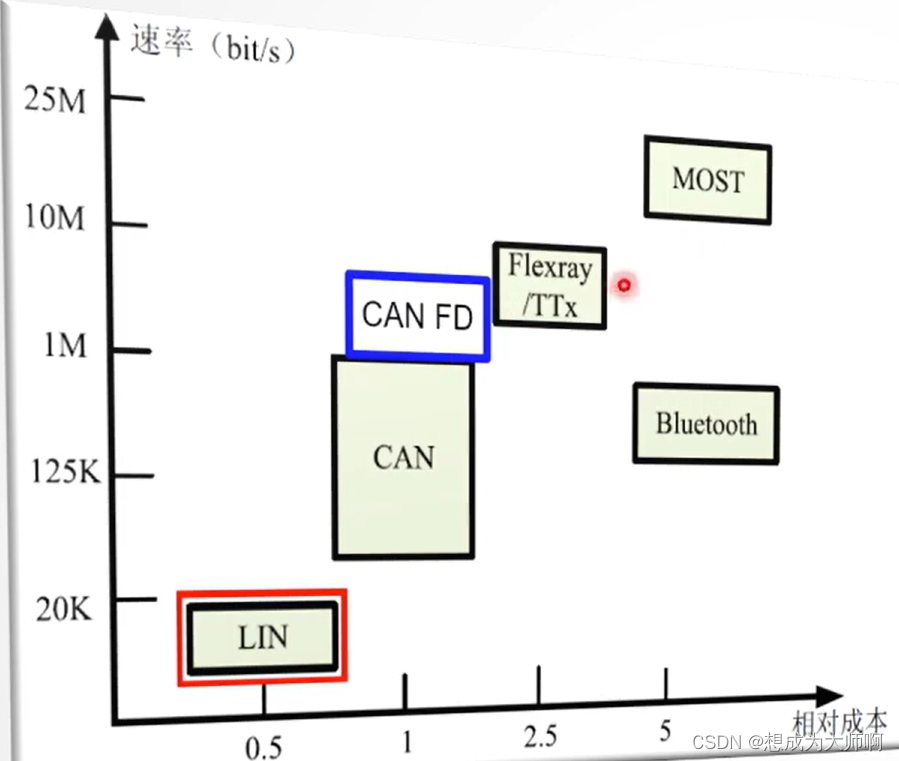
当前的车用总线:

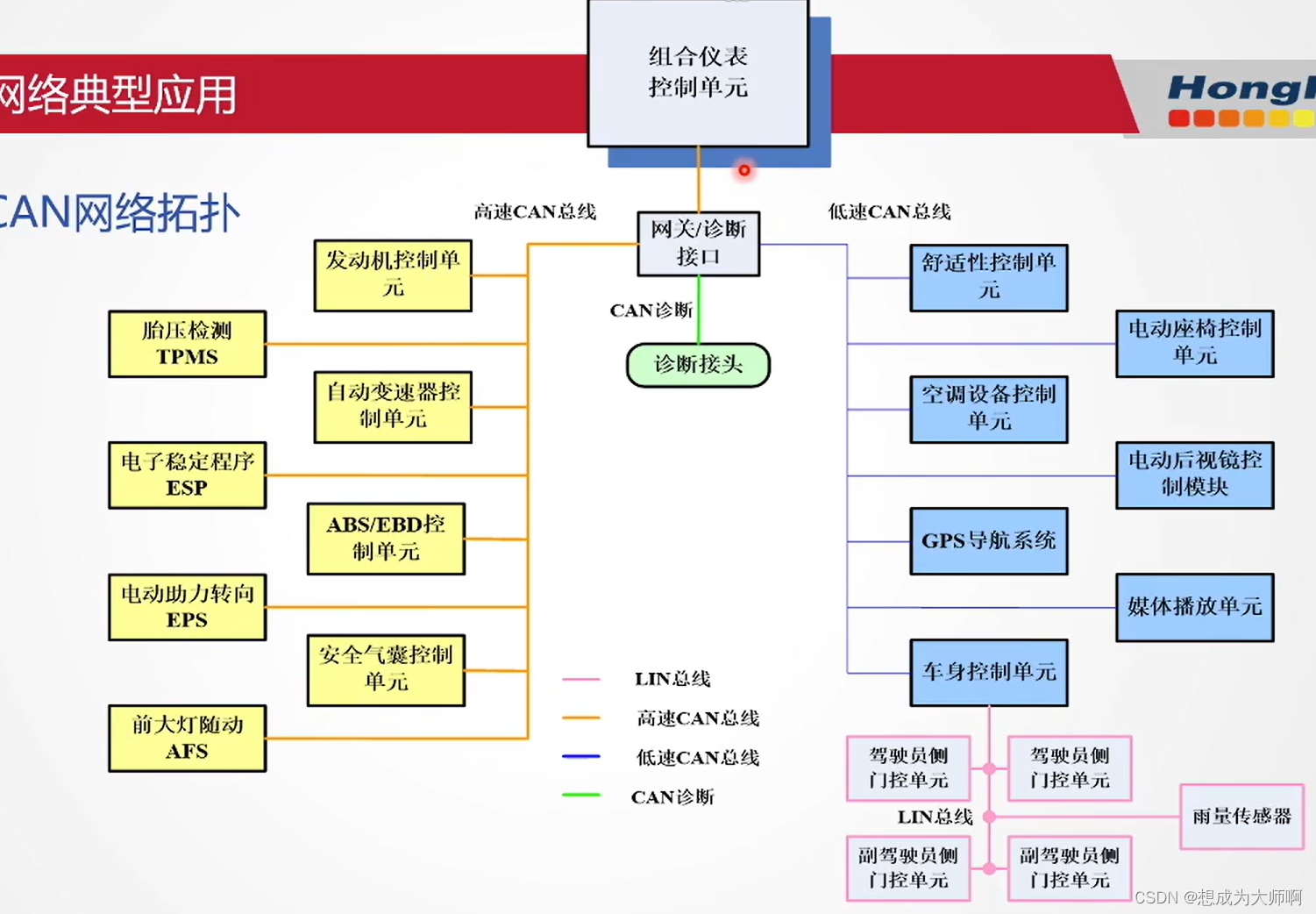
汽车网络典型应用
CAN总线在汽车网络中脱颖而出的“秘密”
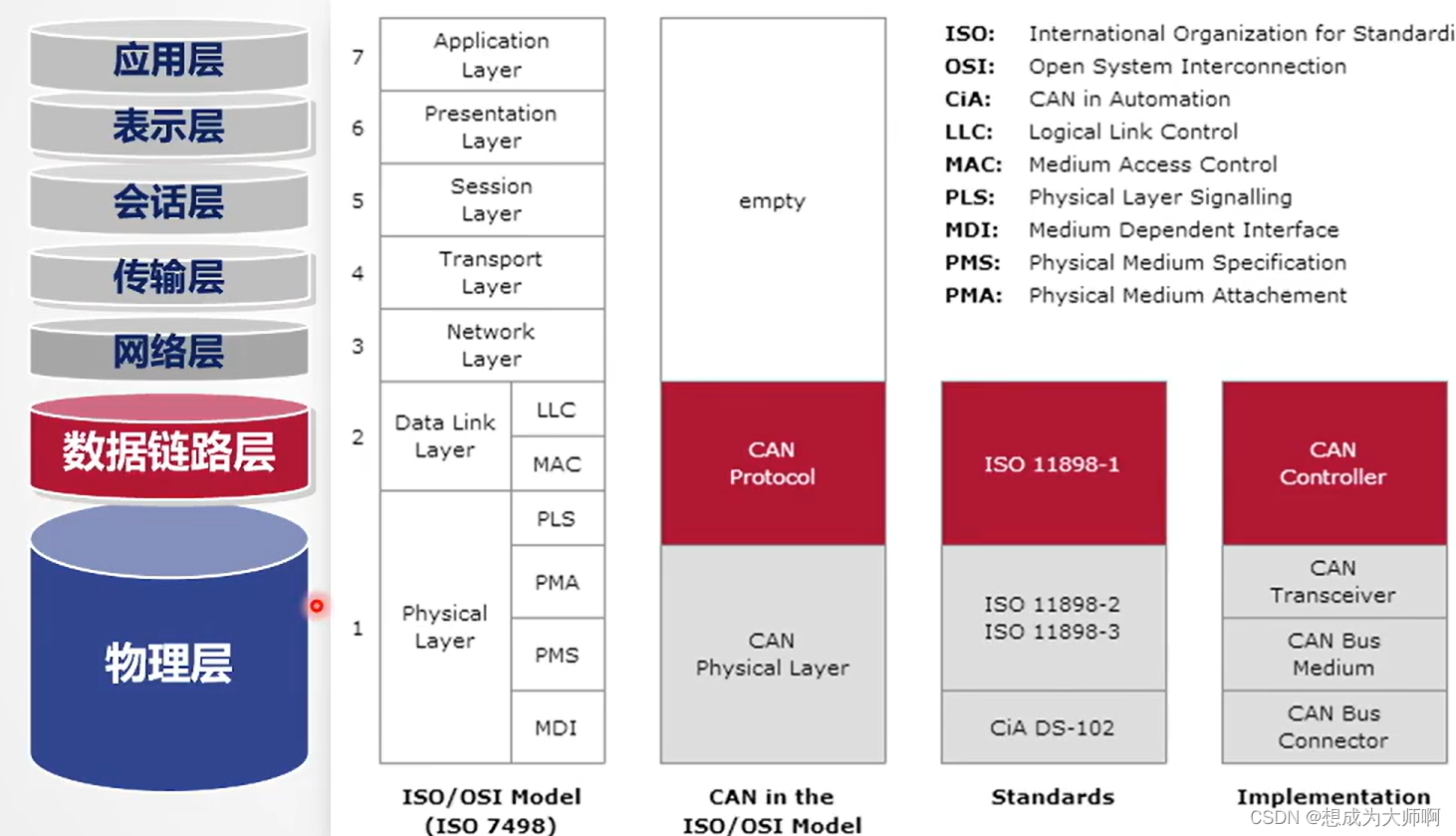
OSI模型与CAN的关系
CAN收发器

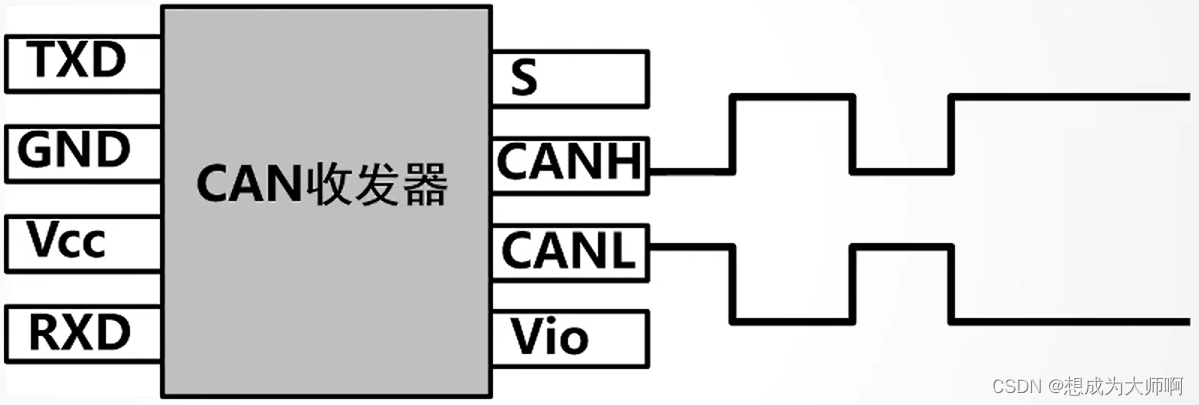

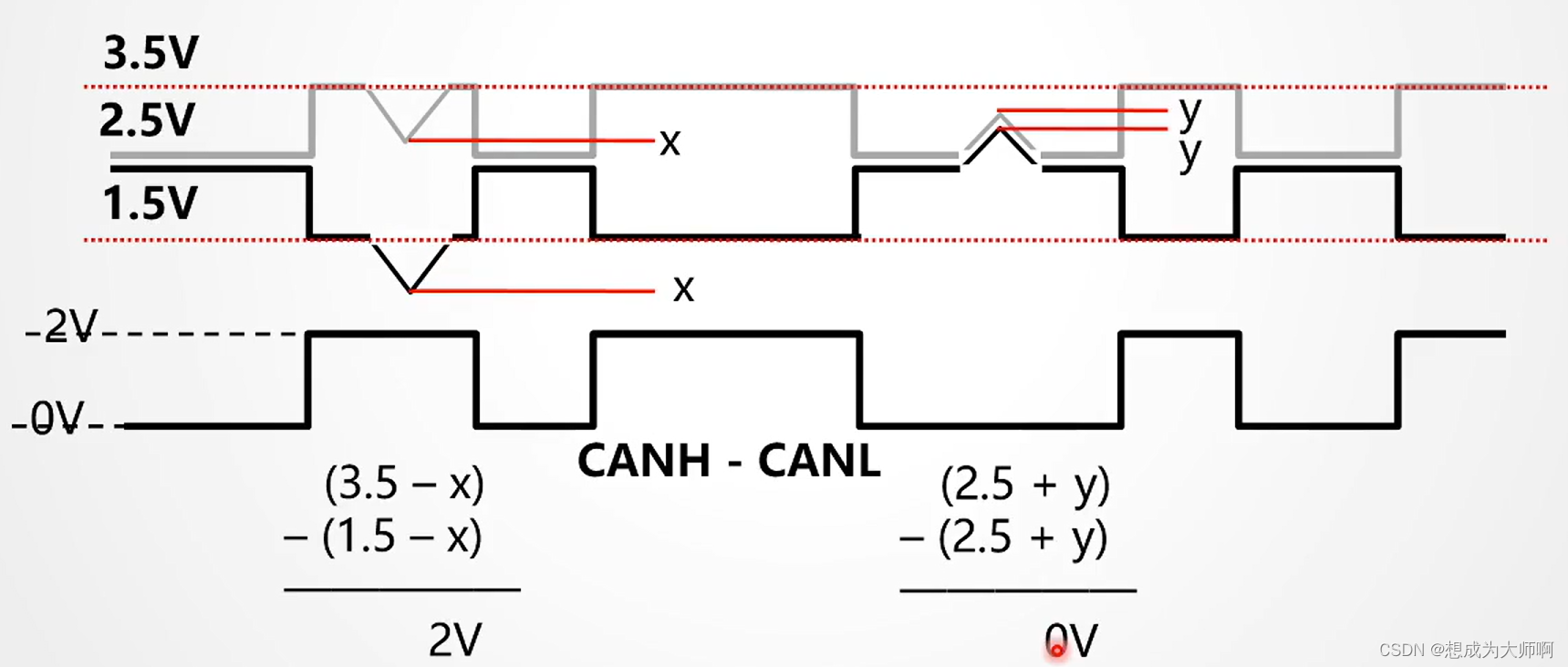
CAN信号电平



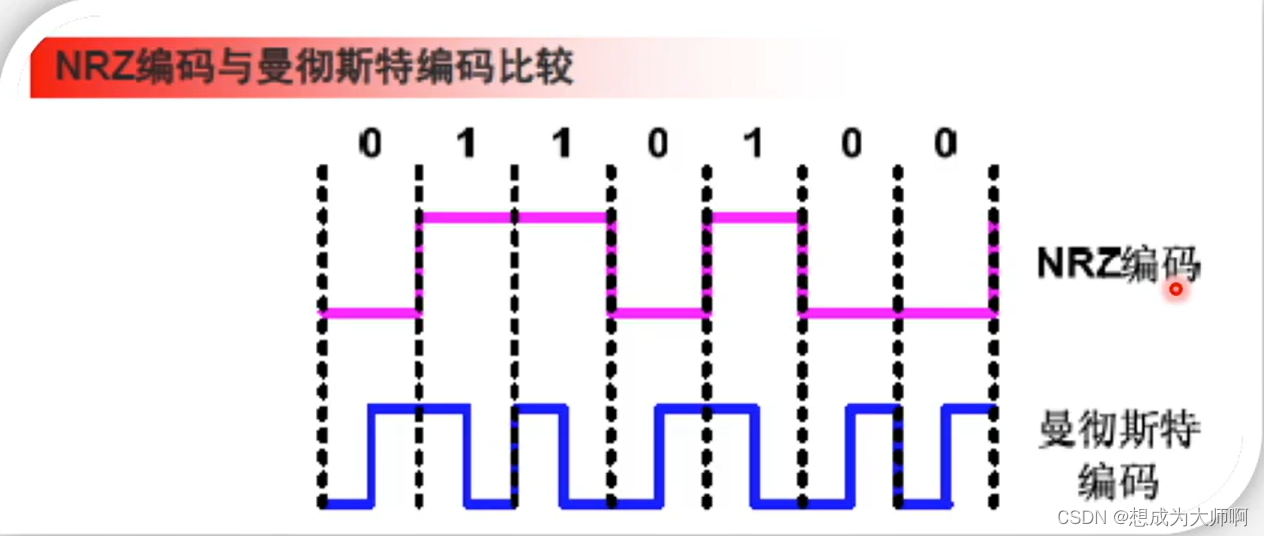
CAN编码方式 -> NRZ(非归零)
CAN信号电平 -> 双绞线
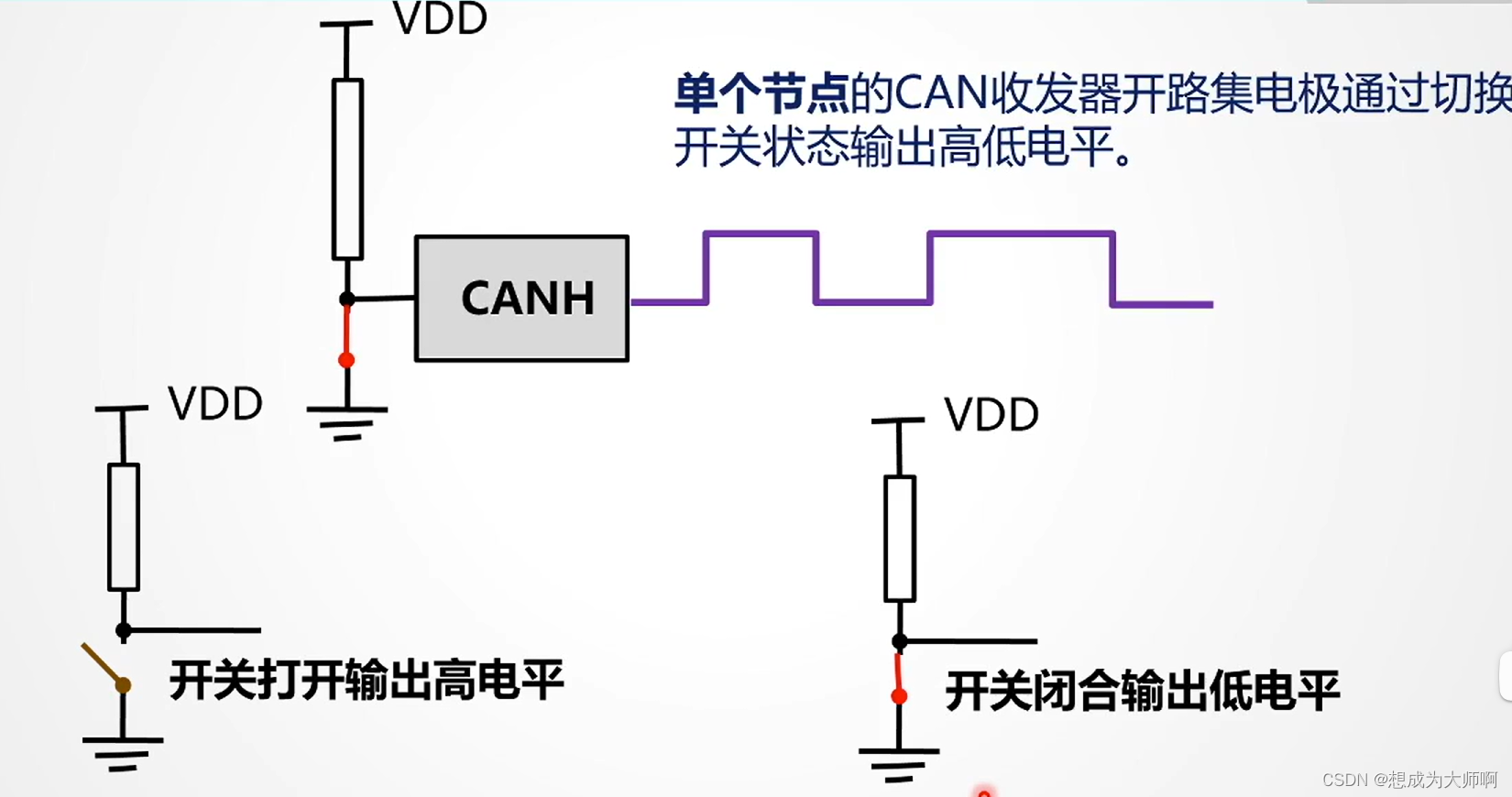
CAN信号电平 -> 线与原理
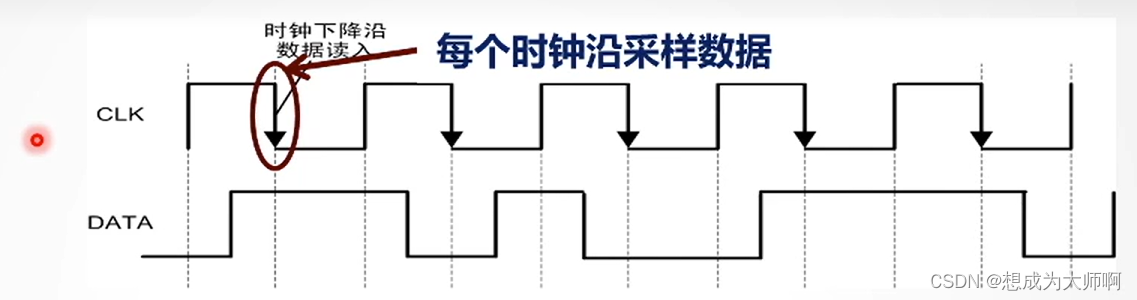
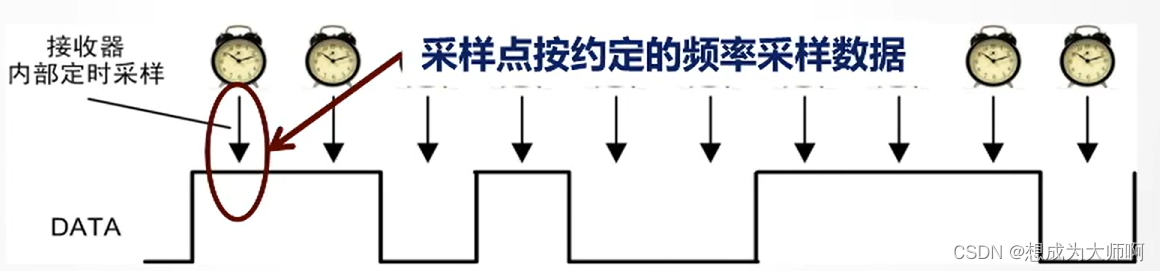
CAN -> 异步串行通信
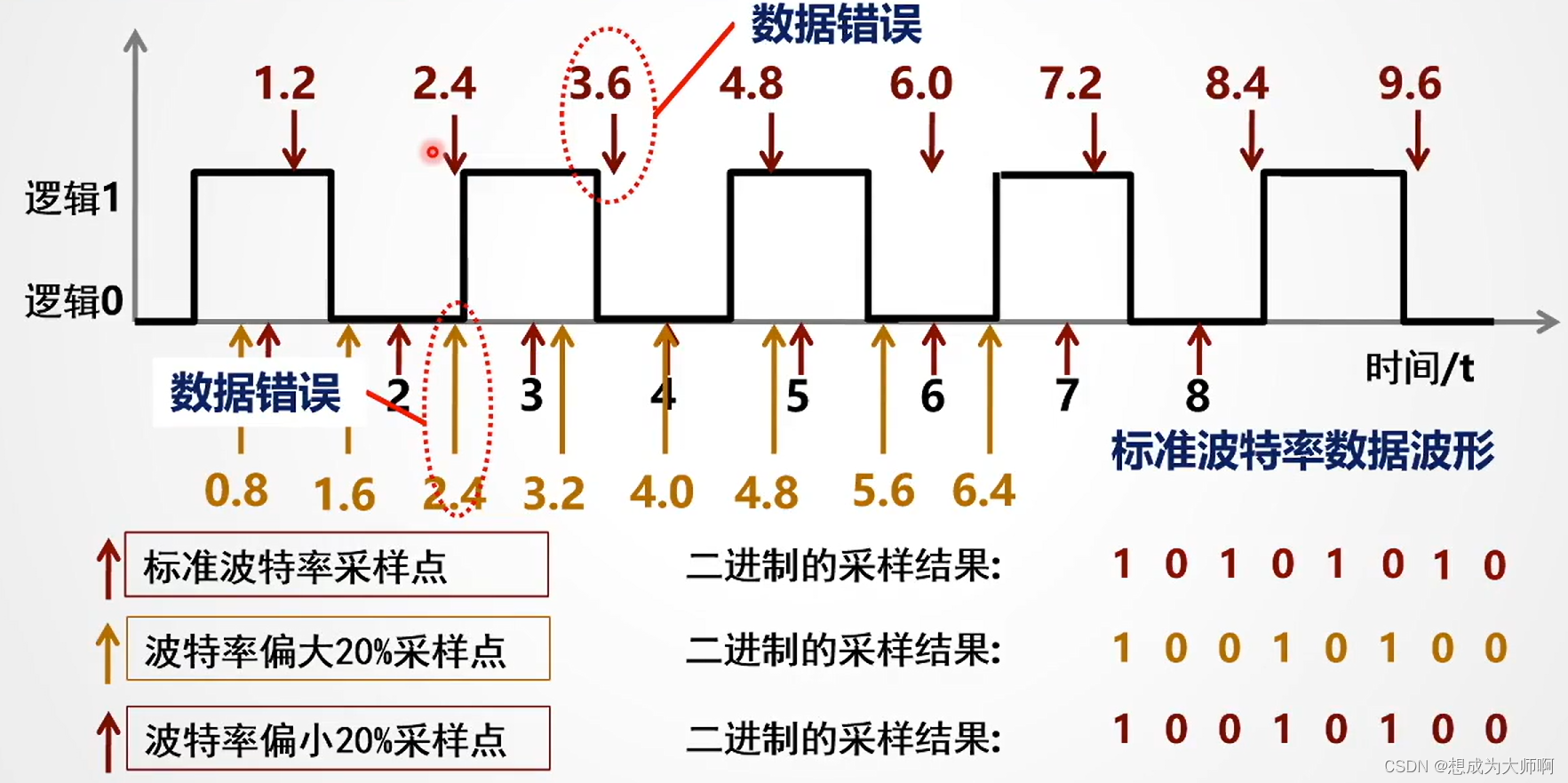
CAN -> 波特率误差带来的错误
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。