一 安装python 库
前置条件需要 Python >= 3.6,使用pip 安装
二 Robotics Toolbox Python样例程序
加载机器人模型
加载由URDF文件定义的Franka Emika Panda机器人模型
计算正向运动学
解逆运动学
首先选择根据位置和方向(末端执行器z轴向下(A=-z)和手指方向平行于y轴(O=+y))定义的SE(3)姿势
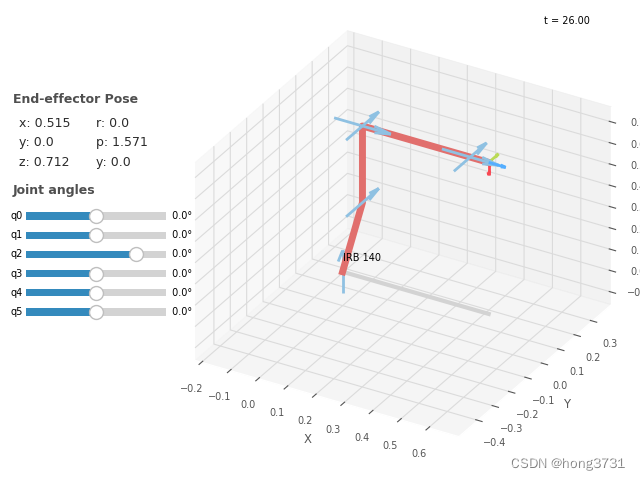
动画显示
显示示教界面
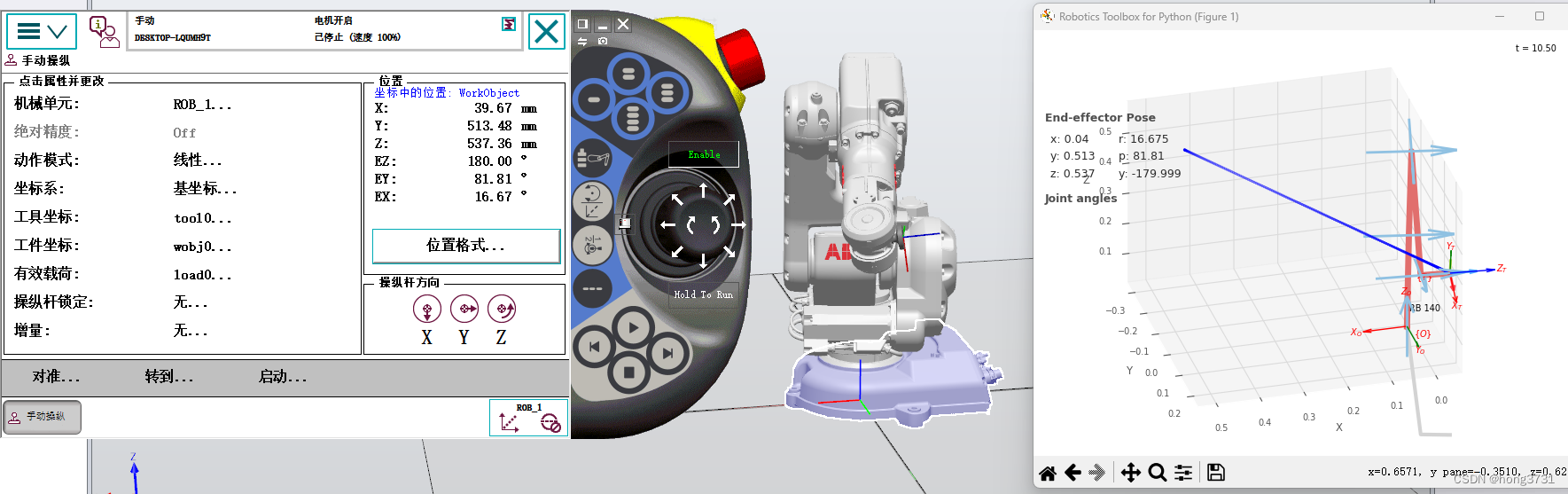
三 Robotics Toolbox Python和ABB 机器人 robot studio 的验证
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。





