yolo目标检测原理
使用yolo进行目标检测的主要思想是将目标检测任务转化为一个回归问题,通过前向传播过程完成目标的定位和分类。yolo通常采用backbone–neck–head的网络结构。
yolov5详解
yolov8
YOLOv8是Ultralytics公司于2023年1月10日发布的YOLOv5的下一个重大更新版本。它是一种用于目标检测的先进深度学习算法,支持图像分类、物体检测和实例分割任务。
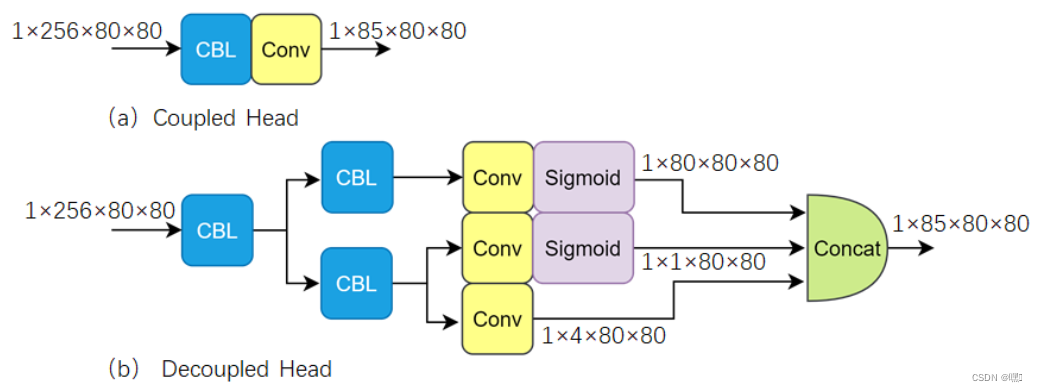
yolov5和yolov8的推理过程几乎一样,在backbone和neck部分,两者都使用了CSP梯度分流的思想,且都使用了SPPF模块,不同的是yolov8使用梯度流更丰富的C2f结构,对不同尺度模型调整了不同的通道数。在head部分,将之前的耦合头结构换成了目前主流的解耦头结构,将分类和检测头分离,同时也从Anchor-Based换成了Anchor-Free。
yolov8结构图
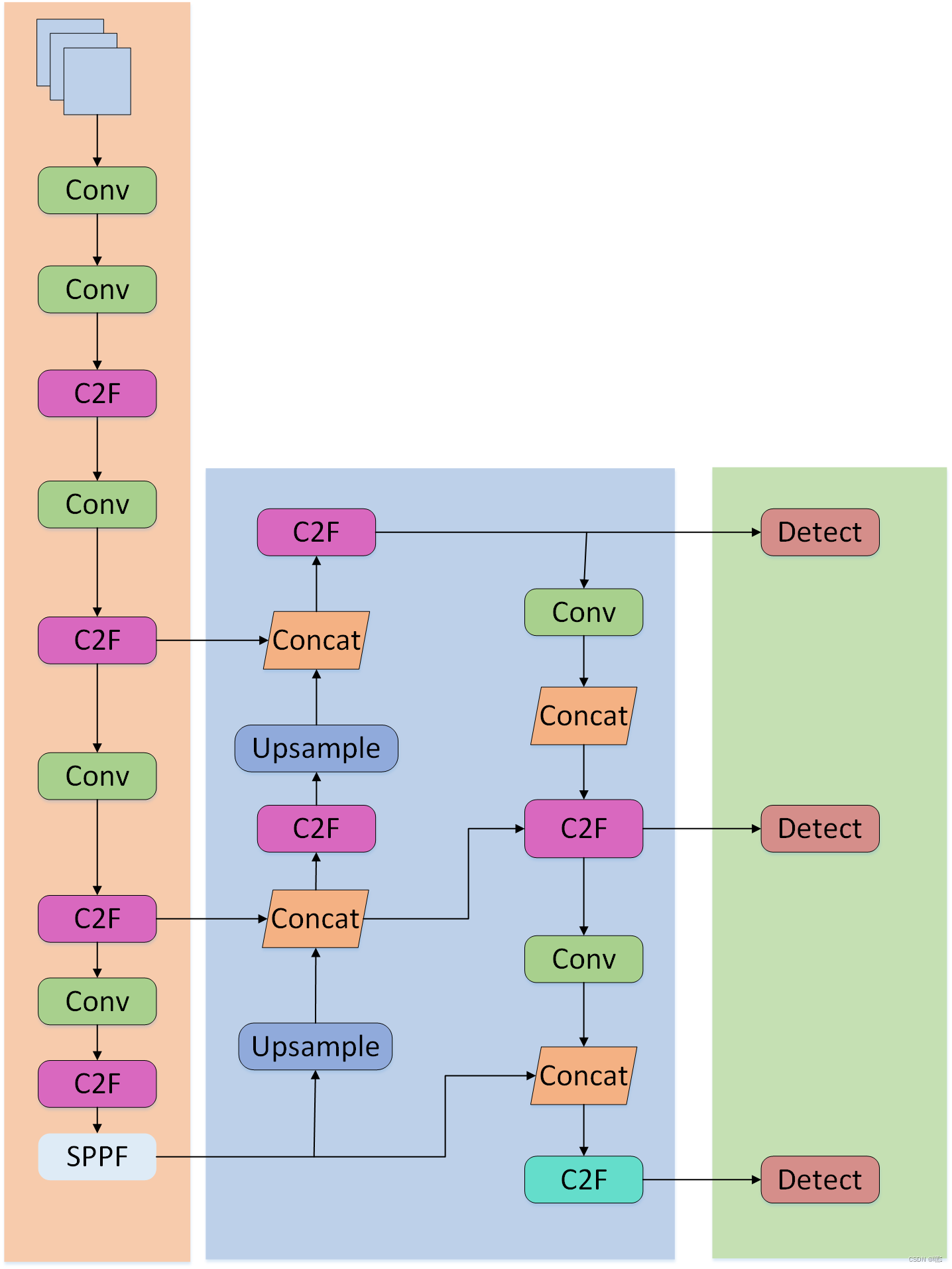
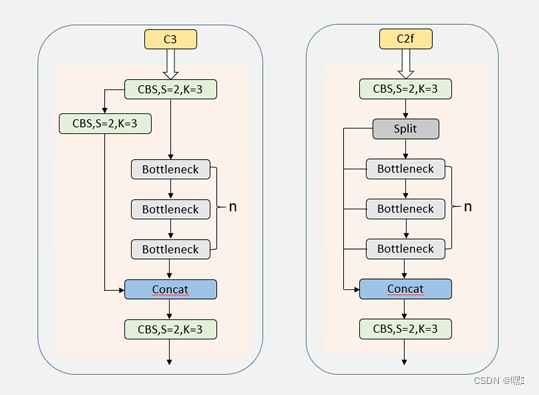
将yolov8和yolov5结构图对比可发现,yolov5中的C3模块全部替换成C2f模块。
Conv模块

Conv 模块由单个 Conv2d、BatchNorm2d 和激活函数构成,用于提取特征并整理特征图
C2f模块和C3模块
耦合头Coupled Head和解耦头 Decoupled Head
Anchor-Based和Anchor–free
Anchor-Based
Anchor-free
总结:
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。