经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.1 基本雷达功能
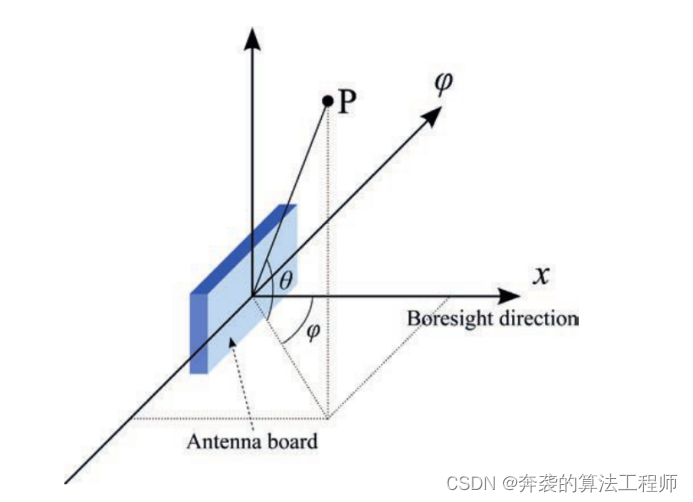
雷达系统通过天线或天线阵列向空间辐射电磁能量。辐射的电磁能量“照亮”周围的目标。“被照亮”的目标拦截一些辐射能量,并将一部分反射回雷达系统。雷达系统利用一个或多个接收信道来探测反射能量以确定目标的距离、速度和相对角度。
根据雷达发射机发射的波形类型不同,雷达系统可分为脉冲雷达和连续波雷达。脉冲雷达由一串重复的短持续时间脉冲组成。根据发射脉冲和接收脉冲之间的时间延迟来测量目标的距离。与脉冲雷达不同,连续波雷达通常在一段时间内连续发射电磁波。通过将接收到的信号与发射信号进行比较,获得目标的特性。在汽车应用中,连续波雷达系统因其在多个方面的优势而占据主导地位。与脉冲雷达相比,连续波雷达具有峰值发射功率低、结构简单、集成度高的特点,应用领域广泛,尤其是汽车领域。本章试图对汽车应用雷达技术的基本原理进行全面、一致的阐述。虽然脉冲雷达和连续波雷达之间的许多概念是相同的,但在本书中,更强调连续波雷达。
汽车雷达的功能可分为探测、跟踪和成像。在本章中,重点是检测,以及执行任务的信号处理的基本技术。跟踪和成像将在接下来的章节中讨论。对于目标探测来说,最根本的问题是确定接收机接收到的回波是来自物体的反射还是仅仅是噪声。对于连续波雷达,通常通过将接收到的回波信号幅度与阈值进行比较来做出检测决策,该阈值可以预先定义或实时计算。对于鲁棒雷达系统,需要从实时雷达数据中自适应计算阈值。
为了获得目标的距离,连续波雷达需要某些类型的调制。利用调制将距离信息编码成回波信号,再通过信号处理提取回波信号。例如,线性调频连续波(FMCW)雷达将目标的距离编码为基带信号的频率。在相位调制连续波雷达中,距离信息按相位码序列进行编码,通过计算回波与原始码序列的相关性提取相位码序列。尽管有各种类型的调制,雷达的距离分辨率(ΔR)与发射信号的带宽(BW)成反比:
![]() (2.1)
(2.1)