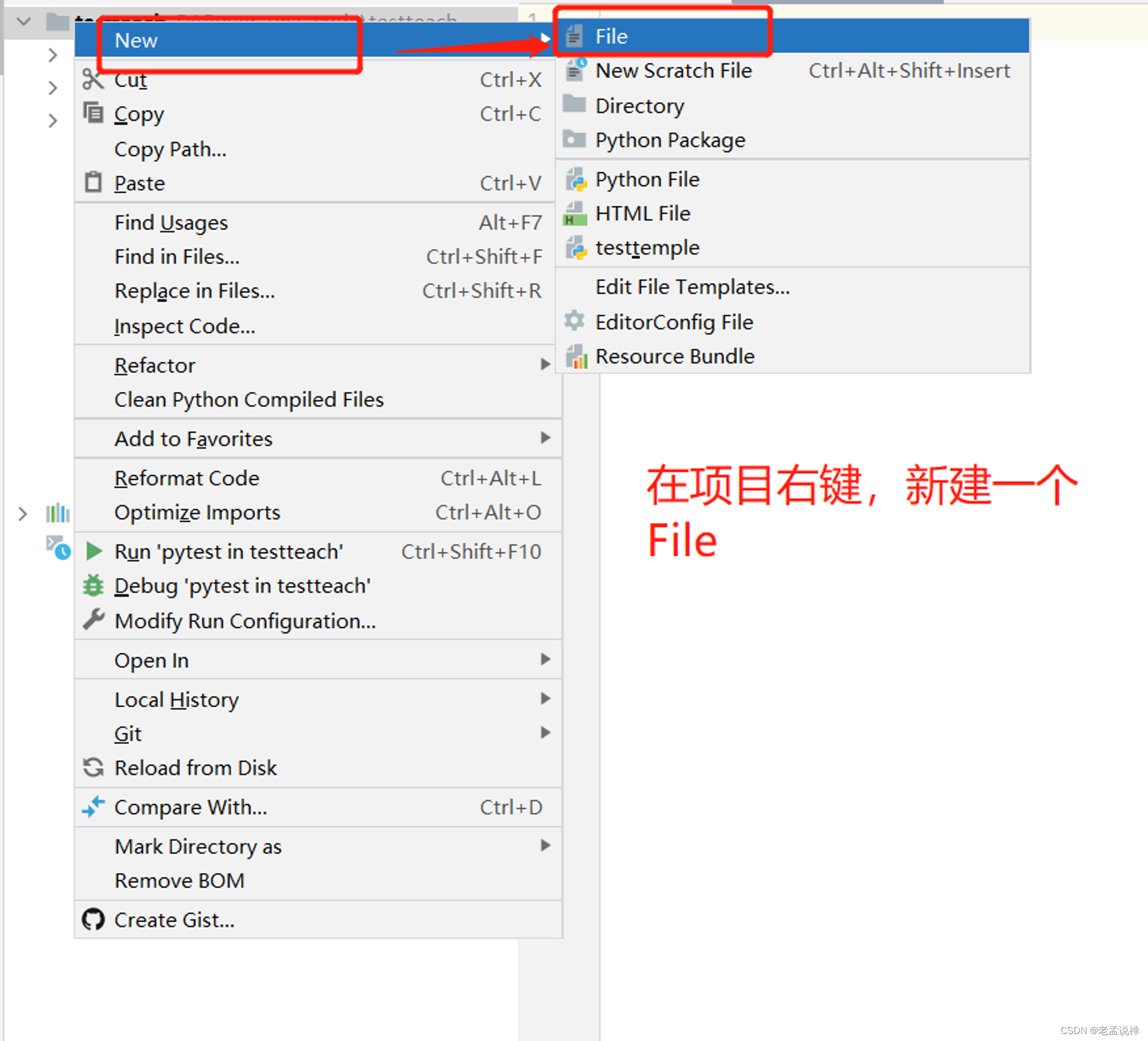
本文介绍: 2.1从 xxx.lua中注释掉这行:–TRAJECTORY_BUILDER_2D.use_imu_data = false。2.2 在launch中注掉 2.从xxx.lua文件与launch文件中同时去除imu相关数据。1.重新设置imu,使imu有数据。具体原因是imu没有重力数据。
cartographer离线建图报错: data_.trajectory_nodes.SizeOfTrajectoryOrZero
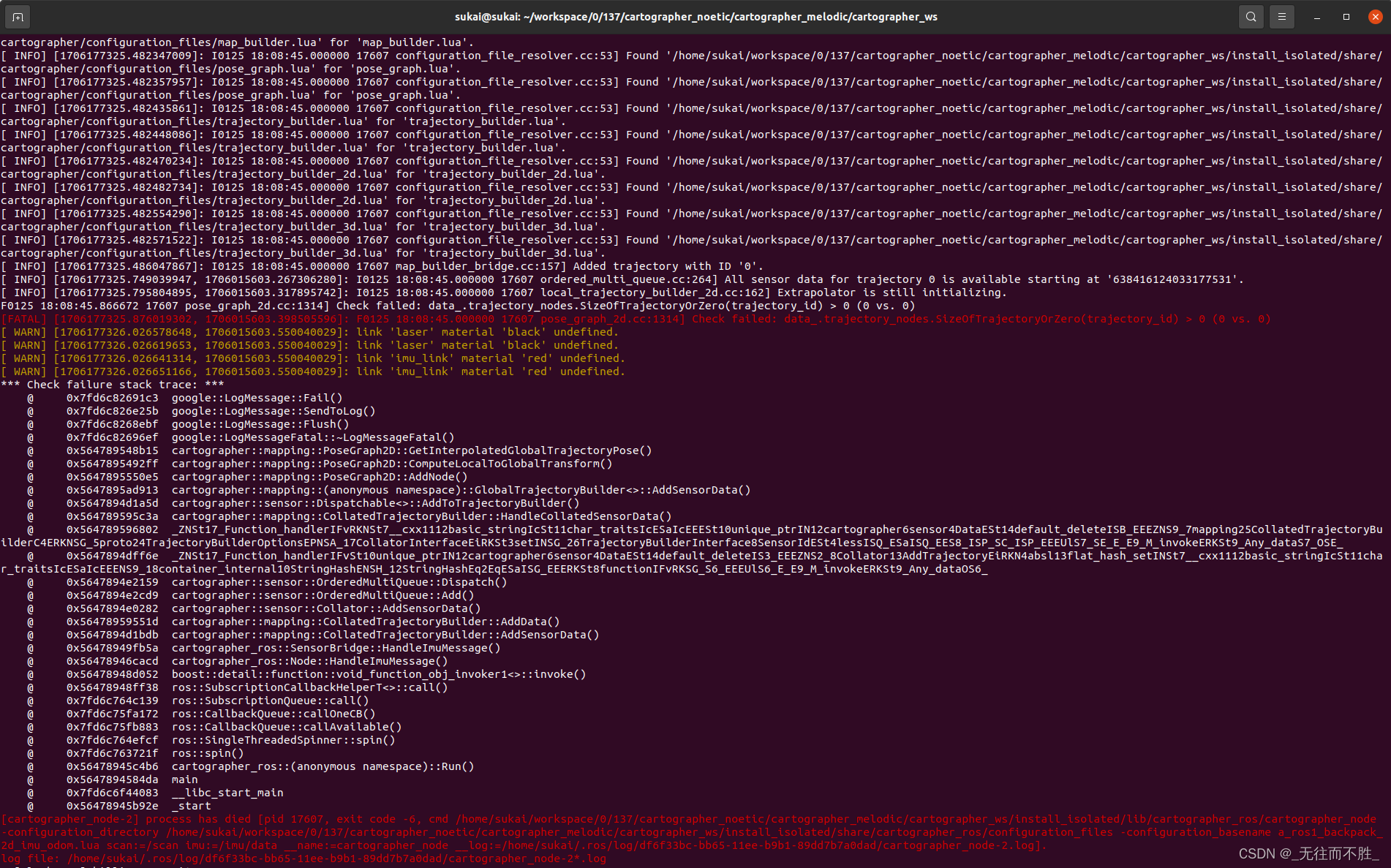
[FATAL] [1706177325.876019302, 1706015603.398505596]: F0125 18:08:45.000000 17607 pose_graph_2d.cc:1314] Check failed: data_.trajectory_nodes.SizeOfTrajectoryOrZero(trajectory_id) > 0 (0 vs. 0)
[cartographer_node-2] process has died [pid 17607, exit code -6, cmd /home/sukai/workspace/0/137/cartographer_noetic/cartographer_melodic/cartographer_ws/install_isolated/lib/cartographer_ros/cartographer_node -configuration_directory /home/sukai/workspace/0/137/cartographer_noetic/cartographer_melodic/cartographer_ws/install_isolated/share/cartographer_ros/configuration_files -configuration_basename a_ros1_backpack_2d_imu_odom.lua sc
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。