术语和定义
1. 全景影像监测系统 —— AVMS(around view monitoring system) 向驾驶员提供车辆周围360°范围内环境的实时影像信息的系统。
2. 系统盲区 —— 因摄像头布置和车身结构限制等原因,系统无法监测到的车辆周边区域。
3. 单视图 —— 对某一路摄像头采集的图像进行单独显示的视图。单视图可分为前单视图、后单视图、左单视图、右单视图。
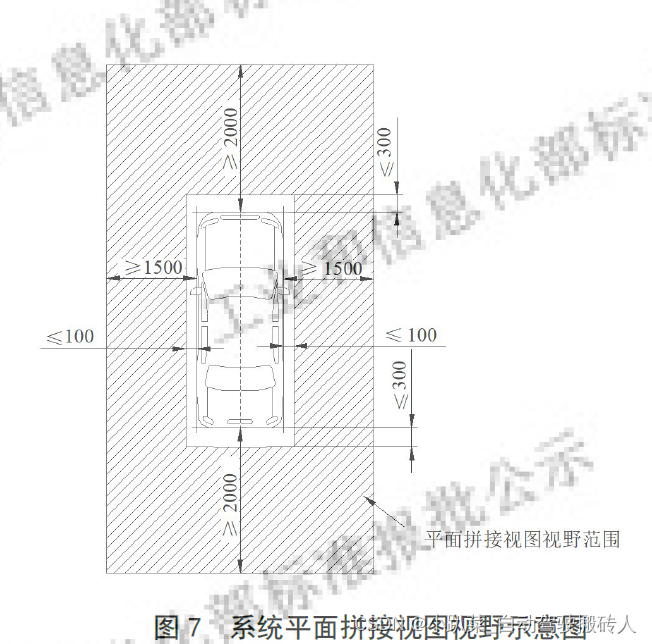
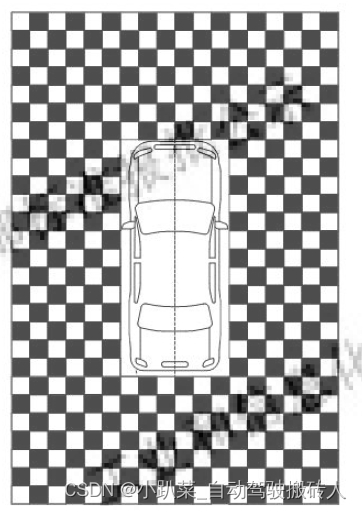
4. 平面拼接视图 —— 将各路摄像头采集的图像处理得到的一幅显示车辆周边环境信息的平面视图。
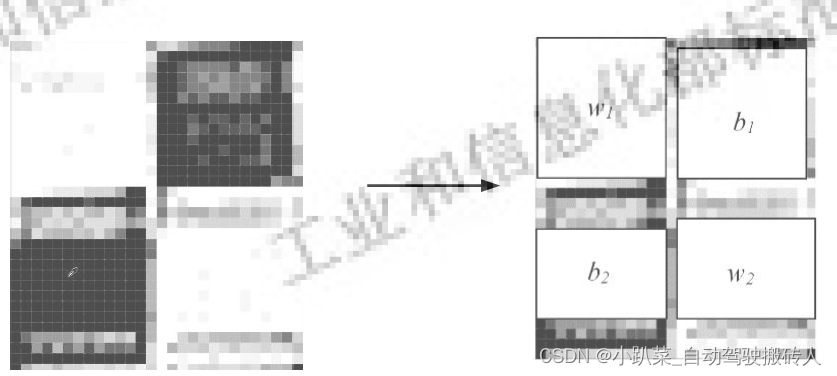
5. 拼接缝隙 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后产生的图像缝隙,如图所示。

6. 拼接错位 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像显示位置的偏移,如图所示。

7. 拼接重影 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像的叠加显示,如图所示。
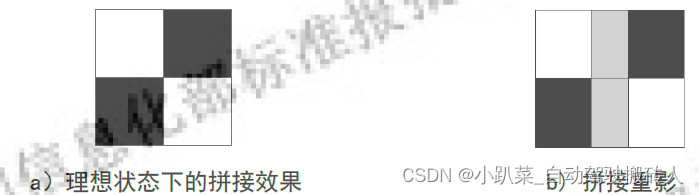
8. 拼接损失 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像的部分丢失,如图所示。

一般要求
功能要求
1. 车辆在启动状态下,应至少在进入倒车挡位时在显示屏中立即清晰地显示车辆周围环境的实时影像信息。
2. 系统应能输出平面拼接视图,且应满足以下要求:
2.1 M 类、N1类车辆的系统支持360°范围内视图拼接
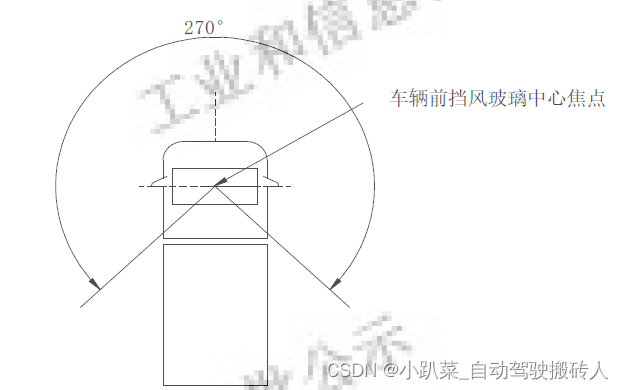
2.2 N2类、N3类车辆的系统至少支持如图所示的270°范围内视图拼接,且为新增摄像头留有接口,以补充后部视野显示。
3. 平面拼接视图中,车辆模型应车头竖直朝上布置,宜水平居中,不应出现明显的偏移或倾斜,垂直方向可有适当的偏移。
4. 系统应具备输出单视图的功能,并满足以下要求
4.1 类、N1类车辆显示前单视图、后单视图、左单视图和右单视图;
4.2 N2类、N3类车辆至少显示前单视图、左单视图和右单视图
故障指示
系统应至少以光学信号的方式提示驾驶员系统故障,该故障信号可与其他系统共用文字、图形或位置。




![[word] word页面视图放大后,影响打印吗? #笔记#学习方法](https://img-blog.csdnimg.cn/img_convert/b0f507e3421d4317b2c4620b0ffc2d28.jpeg)

